گروه آموزشی الکترونیک و کامپیوتر
برق الکترونیک ، مخابرات ، قدرت ، کنترل ، کامپیوترگروه آموزشی الکترونیک و کامپیوتر
برق الکترونیک ، مخابرات ، قدرت ، کنترل ، کامپیوتردرباره من
 هدف این وبلاگ ارتباط با دانش آموزان و دانشجویان اینجانب و گردآوری مطالب علمی ، ترویج فرهنگ مطالعه و پژوهش می باشد و به جز اهداف آموزشی هیچ هدف دیگری را دنبال نمی کند.
(توکل به خدا)
از همه تقاضا می کنم در صورتی که کتابی را در این وبلاگ مفید یافتند برای حمایت از ناشر و نویسنده ، آن کتاب را خریداری کنند (تلاشم این است که مطالب وبلاگ تجربیات و آثار خودم باشد با این حال هر اثری که صاحب آن رضایت نداشته باشد از روی وبلاگ حذف خواهد شد ) ........... edugroup.ir ........ امین خسروجردی arvinco@gmail.com
ادامه...
هدف این وبلاگ ارتباط با دانش آموزان و دانشجویان اینجانب و گردآوری مطالب علمی ، ترویج فرهنگ مطالعه و پژوهش می باشد و به جز اهداف آموزشی هیچ هدف دیگری را دنبال نمی کند.
(توکل به خدا)
از همه تقاضا می کنم در صورتی که کتابی را در این وبلاگ مفید یافتند برای حمایت از ناشر و نویسنده ، آن کتاب را خریداری کنند (تلاشم این است که مطالب وبلاگ تجربیات و آثار خودم باشد با این حال هر اثری که صاحب آن رضایت نداشته باشد از روی وبلاگ حذف خواهد شد ) ........... edugroup.ir ........ امین خسروجردی arvinco@gmail.com
ادامه...
پیوندها
دستهها
- کارودانش 4
- فنی و حرفه ای 4
- پی ال سی (PLC) 11
- الکترونیک صنعتی 6
- تعمیر تلویزیون رنگی 5
- تعمیر تلفن رومیزی و همراه 3
- برق صنعتی 7
- برق ساختمان و خودرو 8
- ماشین های الکتریکی 5
- نرم افزار های برق و الکترونیک 3
- الکترونیک و مخابرات 20
- الکتروتکنیک و برق قدرت 5
- رباتیک، کنترل و اتوماسیون 6
- کامپیوتر ،شبکه و اینترنت 8
- دانش آموزان و هنرجویان 4
- هنرآموزان 1
- متفرقه 8
ابر برجسب
Arduino آردوینو سیم سیم لاکی SWG مدیاتک اندروید موبایل گوشی رام سیستم صوتی رله مجله الکترونیک کتاببرگهها
- شیوه نامه گروه های آموزشی ۹۰-۸۹
- تمام کتب درسی برق شاخه کارودانش و فنی حرفه ای
- استانداردهای مهارت و آموزش
- چیدمان کارگاهی رشته های برق کارودانش
- ** نمونه سوالات کارور PLC درجه 1 و 2
- ** جزوات آموزشی : شرکت ره آوران فنون پتروشیمی
- * فیلم های آموزشی مهندسی برق از دانشگاه MIT
- مجلات تخصصی برق و الکترونیک نویــز
- دبیرخانه الکترونیک شهرستانهای استان تهران
جدیدترین یادداشتها
همه- نمیآیی باز
- سعدی
- رباعی خیام
- صائب تبریزی
- دانلود تمامی رام های گوشی X-BO V5 با پردازنده MT6572 و MT6582
- وزن و سطح مقطع سیم لاکی (سیم مسی) روکشدار
- فایلهای COMBINATION و نحوه انتخاب فایل مناسب گوشی از روی مشخصات فایل
- تبدیلات قطر سیم برحسب SWG
- استراتژی
- نحوه اتصال بلنگو یا بلندگو ها (با رعایت امپدانس و توان) به سیستم صوتی (آمپلی فایر)
- مجموعه آموزشی توزین (وحید کارگر مقدم)
- روز معلم مبارک
- سال نو مبارک
- حل تمرین های کتاب هندسه 1
- مساحت و محیط شکل های هندسی مهم
- کتاب
- جهالت
- عید
- مجله لهستانی Elektronika dla Wszystkich
- هنر
- زندگی راستین
- کتاب Arduino by Example
- آردوینو
- عید دوستان و دشمنان مبارک
- قانون اهم
- موزیک با آردوینو
- اتصال رله به آردوینو
- به کار گیری (LiquidCrystal displays (LCDs توسط Arduino
- ساخت تاس الکترونیکی با arduino
- ماژول آلتراسونیک سنجش مسافت (سنسور فاصله یاب) hc-sr04
- 3x4 Matrix Keypad
- آموزش راه اندازی سنسور LM35 همراه با اندازه گیری دمای منفی
- کتاب Make: AVR Programming
نویسندگان
- امین خسروجردی 150
بایگانی
- آذر 1403 1
- خرداد 1403 2
- شهریور 1402 1
- آذر 1396 1
- آبان 1396 1
- مهر 1396 1
- شهریور 1396 1
- مرداد 1396 1
- تیر 1396 1
- خرداد 1396 1
- اردیبهشت 1396 1
- فروردین 1396 1
- آذر 1395 2
- آبان 1395 1
- مهر 1395 1
- شهریور 1395 1
- مرداد 1395 1
- تیر 1395 1
- خرداد 1395 1
- اردیبهشت 1395 1
- فروردین 1395 1
- اسفند 1394 1
- بهمن 1394 2
- دی 1394 2
- آذر 1394 4
- آبان 1394 1
- مهر 1394 1
- شهریور 1394 4
- مرداد 1394 1
- تیر 1394 1
- خرداد 1394 2
- اردیبهشت 1394 2
- فروردین 1394 1
- اسفند 1393 1
- بهمن 1393 1
- دی 1393 2
- آذر 1393 2
- آبان 1393 1
- مهر 1393 1
- شهریور 1393 1
- مرداد 1393 1
- تیر 1393 1
- خرداد 1393 1
- اردیبهشت 1393 1
- فروردین 1393 1
- اسفند 1392 2
- بهمن 1392 1
- دی 1392 1
- آذر 1392 1
- آبان 1392 1
- مهر 1392 1
- شهریور 1392 1
- مرداد 1392 1
- تیر 1392 1
- خرداد 1392 1
- اردیبهشت 1392 1
- فروردین 1392 2
- اسفند 1391 2
- بهمن 1391 1
- دی 1391 1
- آذر 1391 2
- آبان 1391 1
- مهر 1391 2
- شهریور 1391 1
- مرداد 1391 3
- تیر 1391 1
- خرداد 1391 1
- اردیبهشت 1391 1
- فروردین 1391 1
- اسفند 1390 2
- بهمن 1390 1
- دی 1390 1
- آذر 1390 1
- آبان 1390 1
- مهر 1390 1
- شهریور 1390 4
- مرداد 1390 4
- تیر 1390 14
- خرداد 1390 13
- اردیبهشت 1390 10
- فروردین 1390 5
- اسفند 1389 3
تقویم
آذر 1403| ش | ی | د | س | چ | پ | ج |
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |
جستجو
آمار : 1017900 بازدید
Powered by Blogsky
راه اندازی موتور به صورت چپگرد راستگرد با دو رله
راه اندازی دو موتور به صورت چپگرد راستگرد با دو رله تک کنتاکت یا همان عملکرد با چهار ترانزیستور با آرایش H نمونه مدار کامل برای کنترل یک روبات در ادامه آمده است |
 |
ادامه مطلب ...
یکشنبه 29 شهریور 1394 ساعت 08:22 ب.ظ
یکشنبه 22 شهریور 1394 ساعت 03:46 ب.ظ
آموزش
انسانها نادان به دنیا میآیند، نه ابله؛ شیوهی آموزش است که آنها را ابله میسازد. برتراند راس
دوشنبه 16 شهریور 1394 ساعت 02:11 ب.ظ
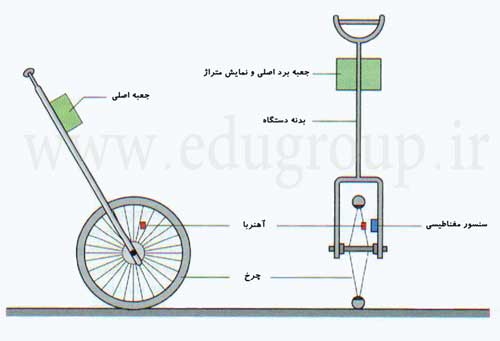
کیت متر دیجیتال
شرح عملکرد : این دستگاه یک متر دیجیتال بدون استفاده از میکروکنترلر و با نمایشگر 7segment 4رقمی است . در قسمت سنسور اندازه گیر مسافت به جای استفاده از شافت انکودر از یک سنسور کنتاکت مگنت استفاده شده است که در هر بار عبور آهنربا از مقابل سنسور یک پالس ایجاد و مدار اصلی انکودر این پالس ها را شمارش و نمایش می دهد . به این طریق می توان با تنظیم مدار و انتخاب چرخی با قطر مناسب به راحتی اقدام به متراژ زمین ها و جاده ها نمود . از آنجا که محیط دایره با فرمول A=2πr بدست می آید . اگر یک دور کامل چرخ 100 سانتیمتر یا یک متر با شد 100=2πr در نتیجه شعاع چرخ حداقل باید 15.92 سانتیمتر باشد . دستگاه در صورتی که به گونه ای تنظیم گردد که یک دور گردش چرخ معادل یک متر باشد یا اینکه چرخی با قطر کوچک تر انتخاب گردد مدار به گونه ای تنظیم شود که هر دو دور گردش چرخ معادل یک متر باشد می تواند تا 9999 متر را با دقت بسیار بالا اندازه گیری نماید . دقت دستگاه در این حالت یک متر خواهد بود و برای دستیابی به دقت های بالاتر باید تعداد آهنرباها را افزایش داد |
 |
چهارشنبه 4 شهریور 1394 ساعت 12:14 ب.ظ